

























 UVT, catalizator al mișcării academice timișorene, își urmează calea spre cunoașterea aprofundată și trecerea către tehnologiile viitorului și ale noilor generațiiUniversitatea de Vest din Timișoara este astăzi cea mai dinamică instituție de învățământ superior din România, o universitate care se...
UVT, catalizator al mișcării academice timișorene, își urmează calea spre cunoașterea aprofundată și trecerea către tehnologiile viitorului și ale noilor generațiiUniversitatea de Vest din Timișoara este astăzi cea mai dinamică instituție de învățământ superior din România, o universitate care se...










Revista >> Mai 2020 [Nr. 224] >> IT&C
Perspective LiDAR pentru vehicule autonome
Prima aplicare semnificativă a fost cartografierea Lunii, reali-zată în 1971, deși anumite aplicări militare ar fi datate dinain-te de 1970. De asemenea, în cercetarea meteorologică avem ceva semne timpurii ale tehnolgiei. Însă adevărata consacrare publică a tehnologiei LiDAR (Light Detection And Ranging) a adus-o, după anul 2000, acea modelare 3D urbană capabilă să pună clădiri și construcții pe harta digitală (deci o aplicație par-ticulară de cartografie/topografie). În zilele noastre ea a fost adoptată și de alte domenii comerciale (precum automobilul autonom), iar perspectivele ei de evoluție tehnică – vizând în-deosebi diminuarea gabaritului și reducerea costului – ne fac să o privim cu încredere pe mai departe.
Tehnică şi aplicaţii
Probabil că cea mai cunoscută aplicare a tehnologiei LIDAR (Light Imaging, Detection And Ranging) este cea referitoare la modelarea digitală tridimensională a terenului (un DTM folosind aeronave), adică în domeniul geo-informaticii (GIS). În cazul LiDAR, cartografierea informatică a universului apropiat presupune detectarea obiectelor din jur prin măsurarea imediată a distanţelor până la acestea, ca premisă pentru construirea de reprezentări 3D ale acestei lumi. (Şi notăm astfel cele două aspecte cheie care au dus la adoptarea tehnologiei: precizia şi viteza determinărilor.) Reţinem şi faptul că este o tehnică asemănătoare radarului, cu dinstincţia că aici nu avem antene de emisie şi recepţie radio, ci dispozitive optice ce transmit şi captează lumină (laser).
În principiu, modul de funcţionare este simplu: detectorul emite un puls de laser (de o anumită frecvenţă, sau lungime de undă) cu care iluminează eventualul obiect aflat în direcţia curentă, iar spotul de lumină ajuns pe suprafaţa acelui obiect este captat de senzorul detectorului, iar această reflexie optică este mă- surată în privinţa timpului în care lumina a parcurs distanţa de la detector la obiect şi înapoi. (Sistemul LiDAR detemină timpul necesar ciclului emisie-recepţie, dar şi modificări în faza luminii sau în lungimea de undă a acesteia.) 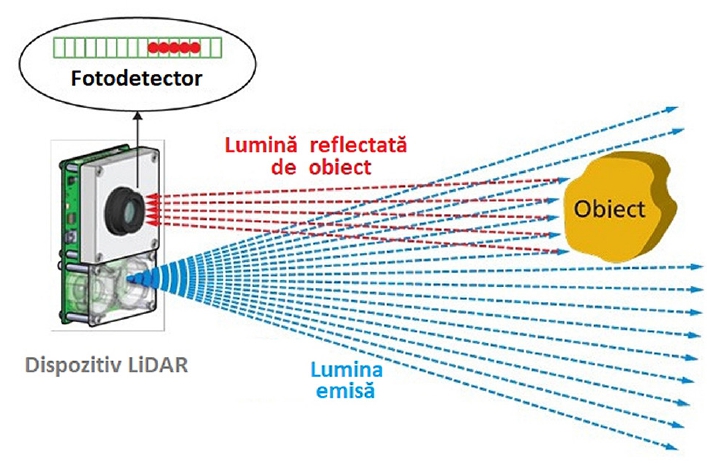
Algoritmul implementat în sistem calculează astfel distanţa curentă până la obiectul din calea razei de lumină curente, iar repetarea acestui ciclu pe măsură ce se modifică direcţia vizată optic (modificare unghiulară, asumată intern de către dispozitiv, sau modificare liniară, realizată de eventuala deplasare relativă a vehiculului purtător al dispozitivului) completează cartografierea lumii înconjurătoare. Şi probabil că astfel înţelegm şi cum de LiDAR-ul constituie baza pentru majoritatea aplicărilor numite generic scannare 3D. Iar dacă la aceasta adăugăm faptul că dispozitivul LiDAR (fix sau montat pe un automobil/aeronavă) îşi poate cunoaşte foarte bine poziţia geografică (graţie înregistrărilor GPS/GNSS pe care algoritmul le poate angrena în determinări), înţelegem de ce tehnologia aceasta are succes şi în aplicaţiile de factură geospaţială (agricultură, climatologie, ecologie, oceanologie, siguranţa transporturilor aeriene, etc).
Vehicule aeriene autonome
Aplicările LiDAR în domeniului automobilelor autonome – ajunse astăzi aproape de maturitate – sunt oarecum cunoscute publicului, aşa că ne focalizăm acum pe un domeniu „adiacent”, cel al vehiculelor aeriene autopilotate, al UAV-urilor, fie ele drone, elicopetere sau mici aeronave. Avem aici şi un nou acronim: eVTOL – vehicul electric cu decolare şi aterizare verticale, desemnând deci „maşina zburătoare”, iar în direcţia aceasta se angajează tot mai multe companii renumite (Airbus, Uber, Audi, Boeing, Porsche, Rolls-Royce, Tesla, Toyota, Aston Martin, etc).
Spre deosebire de aplicările LiDAR pentru vehiculele terestre, în domeniul UAV-urilor se impun cerinţe mai drastice privind performanţa senzorului, greutatea echipamentului şi eficienţa acumulatorului electric. Înainte de a reveni asupra unor particularităţi tehnice, mai notăm faptul că sunt în derulare experimente de creare a unor vehicule aeriene care, după aterizare, intră în regim de automobil terestru (precum Vahana, A3). Şi, apropo de aterizare, vom observa că pentru vehiculul aerian, care adesea zboară pe coridoare aeriene prestabilite, tehnologia LiDAR intervine esenţialmeente la pregătirea şi realizarea aterizării, unde este necesară o bună poziţionare şi o detectare cât mai perfectă a eventualelor obstacole.
Particularizări şi tehnologii
Dispozitivul LiDAR conţine un emiţător de pulsuri laser şi un receptor de lumină laser, iar cu acestea măsoară timpul necesar luminii să parcurgă distanţa până la obstacolul aflat în calea fascicolului laser. Repetând foarte des ciclul de emitere-citire în timp ce baleiază spaţiul în direcţia analizată, se creează în timp-real o hartă a zonei respective (pe o distanţă de 100- 500 metri în faţă), generând de fapt o imagine compusă dintr-un nor de puncte tridimensionale pe care algoritmul digital ştie să-l proceseze/interpreteze pentru a furniza decizii privind ghidarea vehiculului asistat.
Referitor la modul în care senzorul baleiază zona din faţa vehiculului, scanarea mecanică (reorientarea fizică a senzorului LiDAR) constituie o tehnologie bine pusă la punct (oferind uzual un câmp de vizare de maxim 360º x 40º), însă costurile mari şi gabaritul semnificativ au determinat orientarea atenţiei către senzorii solid-state, cu baleiere controlată optic, care au potenţial bun în privinţa costurilor, dimensiunilor şi greutăţii.
Orientarea unghiulară optică a fascicolului se poate face fie folosind micro-oglinzi MEMS comandabile dinamic, fie prin integrarea din fabrică a unei matrice de fotodiode (8-64 de senzori) orientate corespunzător, fie prin integrarea fotodiodelor receptoare într-o grilă de oglinzi orientate dispers. Însă reţinem faptul că baleierea optică nu este realizabilă pentru unghiuri mai mari de 180 de grade.
Parerea ta conteaza: ![]()
![]()
![]()
![]()
![]()
 Proiectarea asistată în electronică
Proiectarea asistată în electronică