

























.jpg) Academia Română a fost creată în 1866 pentru a cristaliza cele mai înalte valori intelectuale din provinciile românești într-o societate erudită menită să consolideze identitatea națională pe baza a patru componente esențiale: limbă și literatură, istorie, etnografie și cultură. La...
Academia Română a fost creată în 1866 pentru a cristaliza cele mai înalte valori intelectuale din provinciile românești într-o societate erudită menită să consolideze identitatea națională pe baza a patru componente esențiale: limbă și literatură, istorie, etnografie și cultură. La...








Senzori optici pentru automobile autonome
În revista Market Watch nr. 224/2020 am prezentat aspectele tehnice cheie ale senzorilor optici destinați automobilelor fără șofer, iar acum revenim punctând avansurile câștigate între timp în acest domeniu, dar notăm și câteva aspecte de perspectivă. Context automobilistic
Context automobilistic
Aderând la obiectivul general de siguranță rutieră, constructorii de automobile se străduiesc să integreze în produsele lor diverse sisteme de protecție și de asistență la șofat. La aceasta se adaugă în ultimul timp dezideratul emancipării automobilelor autonome (care se conduc singure), și cele două constituie forța motrice a dezvoltării de sisteme optice pentru asistența circulației rutiere. În prezent, mașinile din producția de serie sunt dotate cu sisteme care ajută astfel:
♦ avertizare la părăsirea benzii de circulație;
♦ avertizare la apropierea riscantă de vehiculul din față;
♦ menținerea distanței constante față de vehicolul din față.
În mod experimental (sau în proiecte pilot de mică anvergură) automobilele pot avea instalate și alte funcții de asistență, ajungând în extremis la mașina care se conduce singură.
Comunitatea specialiștilor implicați în segmentul acesta de piață a acceptat următoarea grilă a nivelelor de asistență/autonomie a automobilelor (definită inițial de Society of Automotive Engineers; sae.org):
♦ Nivel 0: Fără nici o automatizare/asistență.
♦ Nivel 1: Asistență pentru șofer prin menținerea vitezei (Cruise control) și a benzii de rulare (Lane guidance).
♦ Nivel 2: Automatizare parțială: în anumite situații automobilul poate interveni pentru a controla viteza și calea de rulare.
♦ Nivel 3: Automatizare condițională: automobilul controlează viteza și direcția de rulare în anumite condiții.
♦ Nivel 4: Automatizare înaltă: automobilul controlează viteza și direcția deplasării în condiții de trafic determinate.
♦ Nivel 5: Automatizare completă: automobilul nu mai necesită prezența șoferului.
LiDAR – principalul subsistem optic
Cu ajutorul tehnologiei Light Detection and Ranging se măsoară distanța prin emiterea unei raze laser (înspre obiectul vizat) și prin captarea cu un senzor foto a luminii reflectate de acel obiect (și respectiv prin determinarea timpului necesar parcurgerii acestui traseu optic). În urmă cu cinci ani tehnologia a început să fie încorporată în primele automobile autonome, linie în care s-au făcut multe progrese între timp, însă în ultimul timp senzorii LiDAR încep să fie integrați și în automobilele cu șofer, ca sistem de siguranță și de asistență. (La sfârșitul anului trecut compania Mercedes-Benz anunța primele modele care atingeau astfel nivelul trei de autonomie.) Pe lângă principiul de funcționare menționat mai sus (Time-of-Flight), s-au dezvoltat și sisteme LiDAR folosind principiul FMCW (Frequency-Modulated Continuous Wave), caz în care distanța de la dispozitiv la obiectele detectate se calculează pe baza modificărilor în frecvența luminii reflectate.
Măsurarea distanței nu se face singular, ci sistemul LiDAR baleiază continuu mediul cu razele emise orizontal/vertical, astfel că datele furnizate de senzor permit nu doar aflarea distanței în direcția vizată, ci și identificarea formei entității vizate (vehicul, pieton, clădire, alt obiect) și chiar calcularea vitezei relative a acestora. (Cu cât emiterea razei laser și baleierea se fac cu rezoluții mai mari, cu atât obiectele sunt detectate cu precizie mai mare.) În mod firesc această abilitate a făcut tehnologia LiDAR o primă opțiune pentru dotarea automobilelor autonome, și notăm aici acronimele folosite în domeniu: ADAS (Advanced Driver Assistance Systems) și AGV (Automatic Guided Vehicles).
Ca surse pentru razele de lumină emise se folosesc de regulă diode cu impulsuri laser (în cazul ToF), iar ca receptori se folosesc senzori din semiconductori (Si, InGaAs, SiPM). Furnizorii de (sub)sisteme LiDAR folosesc diverse combinații de surse laser și de senzori optici; există mai multe opțiuni și fiecare prezintă avantaje și dezavantaje. De asemenea, așa cum menționam și în articolul anterior, s-au conturat mai multe arhitecturi. De exemplu, dacă inițial baleierea orizontală (modificarea continuă a unghiului de emitere a razei laser) se făcea mecanic (prin rotirea efectivă a dispozitivului optic), astăzi se recurge tot mai des la baleierea optică sau la una mixtă (scanarea cu reorientarea de microoglinzi MEMS; rotația cu oglindă unică; iluminarea de tip flash; etc).
Diverse lasere și abordări tehnice
Între timp s-au reliefat patru tipuri de surse laser potrivite pentru sistemele LiDAR pentru automobile: (1) laseri cu emitere marginală (EEL), (2) lasere cu emitere superficială din cavitate verticală (VCSEL), (3) lasere compacte pompate cu diode (DPSSL) și (4) lasere cu impulusuri prin fibră optică (PFL). Pe de altă parte, implementarea dispozitivelor pentru automobile a revelat cinci criterii tehnico-economice utile când se alege o arhitectură sau când se analizează comparativ arhitecturile: (1) puterea sursei de lumină (respectiv distanța maximă de lucru a dispozitivului LiDAR); (2) siguranța pentru ochi (riscul deranjării sau chiar al afectării); (3) fiabilitatea (funcționalitatea pe termen lung); (4) costul (investiții/achiziții); (5) manufacturabilitatea (fezabilitatea industrială). Din perspectiva acestor criterii cam fiecare tip de laser are avantaje și dezavantaje, în funcție de care se poate alege soluția potrivită implementării. (vedeți figura 1)
Folosind semiconductori cu galiu și arseniu (GaAs), laserii EEL și VCSEL operează în subdomeniul infra-roșu apropiat (905-940 nanometri), au o bună eficiență energetică, sunt simpli, și prezintă compatibilitate cu standardele industriei de automobile. De asemenea, sunt cele mai compacte surse LiDAR. Astăzi arhitectura EEL deține cel mai mare procent din acest sector de piață. Soluția VCSEL are o bună prezență în domeniul telecomunicațiilor cu fibră optică, însă adoptarea ei pentru domeniul LiDAR a presupus dezvoltarea unei arhitecturi multi-joncțiune, pentru a putea atinge densitatea energetică necesară aici. La fezabilitatea-i astfel lărgită se adaugă o mai bună stabilitate a lungimii de undă la variația temepraturii și o fiabilitatea mai ridicată. Tot de partea VCSEL contabilizăm și o adaptare mai bună pentru detectarea cu câmp de vedere (FOV) larg, precum și fabricabilitatea eficientă la volumn mare (prin tehnologie specifică circuitelor integrate cu semiconductori).
Însă, deși au o eficiență optică ridicată, laserele cu semiconductori nu excelează în privința calității razelor de lumină emise. (Un emițător EEL tipic de 10x200 µm, cu putere a pulsului de 120 W, are o acoperire tipică de 25° în plan vertical și de 10° în plan orizontal, rezultând deci într-o formă eliptică a razei.) Parameterii slabi ai laserilor cu semiconductori necesită integrarea în sistemul LiDAR a unor componente optice care să optimizeze direcționalitatea și forma razelor emise. (Se poate asocia sistemului de micro-oglinzi MEMS un subsistem de colimație optică. Un alt procedeu constă în folosirea unei lentile asferice cu focală lungă împreună cu un omogenizator pe axa optică a razei laser.)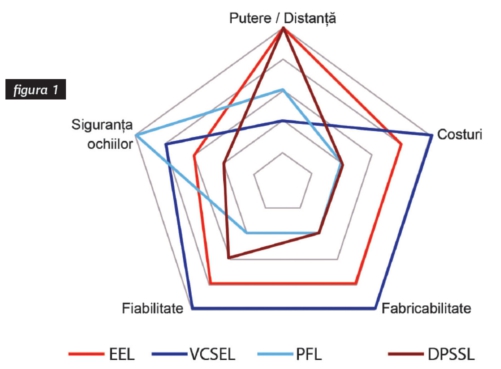
De la compromis la optimizare
Spuneam că s-au probat pe mapamond mai multe arhitecturi de dispozitive LiDAR și mai multe tipuri de surse laser, dar încă nu s-a detașat net o soluție definitivă. Cum fiecare abordare are și ceva neajunsuri, deocamdată soluțiile folosite se bazează pe diverse nuanțe de compromis tehnico-economic. Însă domeniul opto-electronic are o dinamică mare, deci sunt de așteptat evoluții în diverse aspecte. De exemplu, dacă inițial sursa EEL era fabricată într-o capsulă clasică de tranzistor (având astfel oarece probleme termice și de influență parazită), astăzi se pregătește alternativa integrării (lipirii) sursei EEL direct pe placa de circuit imprimat (PCB) sau pe un substrat ceramic apt de montare ulterioară. De asemenea, prin artificii de amortizare termică, sursele EEL cu lungime de undă stabilizată au ajuns la un coeficient de dependență comparabil cu cel de la VCSEL (0,07 nm/°C), ceea ce diminuează necesitatea instalării de elemente de răcire.
O altă tendință de evoluție se manifestă în direcția dispozitivelor laser care emit cu lungimi de undă nepericuloase pentru ochi (în subdomeniul spectral SWIR, cu lungimi de undă între 1340 și 1550 nm). Menționăm că sursele din subdomeniul NIR (infra-roșu apropiat; 905-940 nm) sunt sigure pentru ochi doar dacă lucrează sub o anumită putere, pe când lungimile de undă de 1470-1550 nm permit o limită energetică de câteva ori mai ridicată.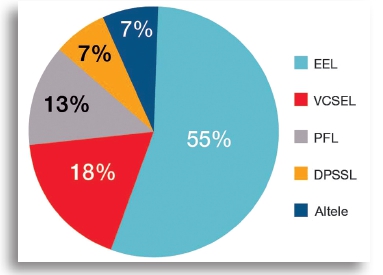
Criteriile producției de serie
Ne amintim că – pe lângă dispozitivul LiDAR – automobilul fără șofer este dotat și cu câteva camere video lucrând în spectrul vizibil (și acestea asigură, împreună cu software-ul aferent, identificarea obiectelor de la 0 până la 50 de metri). La nevoie un RADAR completează percepția mediului (acesta nefiind perturbat de prezența ceții).
Un subsistem opto-electronic destinat echipării automobilelor trebuie să îndeplinească concret trei (clase de) cerințe:
1) Să atingă/depășească criteriile de performanță stabilite în domeniul auto (precum cele amintite în articolul anterior: distanță de detectare a obiectelor de până la 200 de metri, și timpi de răspuns/procesare/decizie sub 50 milisecunde), iar acestea să nu fie afectate semnificativ de condițiile de temperatură sau atmosferice/meteo;
2) Să fie capabil să asigure nivelul de fiabilitate presupus în domeniul automobilelor. (Deși în general sursele laser cu semiconductori dovedesc un nivel bun de fiabilitate, ansamblul dispozitivului opto-electronic ajunge să satisfacă cu greu aceste cerințe.) Observăm și faptul că aici vorbim de un criteriu corelat cu variabila timp, adică certificarea se obține prin analize statistice (pe loturi mari) derulate în perioade de timp relativ mari (12-24 luni), iar condițiile adverse pot angrena mai multe aspecte (temperatură, vibrații, umiditate, stabilitate compozițională a materialelor, etc).
3) Să se preteze la integrarea în liniile de fabricație de serie mare a automobilelor și să fie apt de un nivel înalt de automatizare. Această cerință dublă ne spune că măsura în care instalarea subsistemul LiDAR suportă automatizarea în producție și în testare trebuie să fie comparabilă cu cea a celorlalte componente ale automobilului. (Vedeți indicele Cpk.) Aici trebuie observat că standardul 16949 (definit de International Automotive Task Force, și preluat similar de ISO), care impune ca pentru producția de serie mare să se atingă nivelul de zero defecte, nu este ușor de atins de producătorii de opto-electronice, obișnuiți cu o industrie de volum mic sau moderat.
Oricum, spre final trebuie să ne amintim că, pe măsură ce tehnologiile opto-electronice se maturizează și pe măsură ce sunt transferate din cercetare în producția de serie mare, costurile acestora vor scădea, ceea ce va determina o și mai intensă adoptare și aplicare în industria automobilelor.n
Tags: tehnologie, senzori optici, auomobile autonome, LIDAR
Parerea ta conteaza: ![]()
![]()
![]()
![]()
![]()
Asemanator
 Memoriile drive pentru calculatoare
Memoriile drive pentru calculatoare- GenAI - reticență versus oportunitate: La ce se așteaptă liderii companiilor din România
- Noua era pentru aplicatii si retele sociale: gigantii tehnologici se adapteaza la Legea Pietei Digitale
- Fațetele multiple ale Inteligenței Artificiale
- Construirea unei baze solide pentru securitatea cibernetică a soluțiilor dvs. video
- Baze de date
