

























 UVT, catalizator al mișcării academice timișorene, își urmează calea spre cunoașterea aprofundată și trecerea către tehnologiile viitorului și ale noilor generațiiUniversitatea de Vest din Timișoara este astăzi cea mai dinamică instituție de învățământ superior din România, o universitate care se...
UVT, catalizator al mișcării academice timișorene, își urmează calea spre cunoașterea aprofundată și trecerea către tehnologiile viitorului și ale noilor generațiiUniversitatea de Vest din Timișoara este astăzi cea mai dinamică instituție de învățământ superior din România, o universitate care se...







LiDAR - avansuri și tendințe
La aproape patru ani de la primul articolul despre tehnologiile LiDAR (Light Detection And Ranging), aflăm despre realizările din cercetare și despre manifestările lor pe piață, dar notăm și câteva tendințe și perspective pentru dezvoltare. 
Evoluție în concept și paradigmă
Dacă în articolul din revista Market Watch nr. 224/2020 spuneam că cele mai cunoscute aplicări ale tehnologiilor LIDAR (Laser Imaging, Detection And Ranging) vizează cartografierea digitală a universului apropiat (multe fiind subsumate geo-informaticii), astăzi aflăm că un determinant major în evoluția LiDAR îl constituie industria automobilelor, unde dispozitivele acestea pot ajuta la detectarea imediată a obiectelor din jur, prin măsurarea optică a distanţelor până la acestea, ca premisă pentru dirijarea automobilelor autonome sau pentru un plus de asistență la automobilele cu șofer uman. Și notăm deja consacrarea unei alte abrevieri în domeniu: ADAS – Advanced Driver Assistance Systems.
Desigur, cerințele tehnologice din aplicările GIS sau de modelare urbană/arhitecturală (rezoluție, precizie) sunt diferite de cele presupuse de asistența autovechiculelor (unde primează viteza de lucru, distanța de operare, gabaritul, consumul), însă ponderea și dinamica pieței actuale sunt mai substanțiale de partea industriei auto, astfel că în aceste direcții s-au înregistrat (și probabil că se vor mai înregistra) avansuri semnificative.
Pe lângă aplicările deja consacrate ale detectării vizuale în spațiul 3D înconjurător, între timp au căpătat pondere și altele, precum asigurarea securității obiectivelor (publice sau private), monitorizarea și controlul traficului rutier, monitorizarea aeroporturilor, diverse automatizări industriale/uzinale, elevatoarele autonome pentru depozite, etc. Și ne amintim că dispozitivele LiDAR – prin faptul că pot genera dinamic nori de puncte virtuale în zona vizată – pot fi utilizate pentru detectarea obiectelor din acel mediu, pentru calcularea distanței până la ele, pentru evaluarea dimensiunii lor și chiar pentru determinarea vitezei lor de deplasare.
Sistemele LiDAR au evoluat substanțial în ultimul timp în privința costului, a miniaturizării și a performanței, și aceasta s-a datorat în special investițiilor făcute de companiile producătoare de automobile autonome sau de ADAS. (În tabelul următor am colectat specificațiile dispozitivelor LiDAR actuale.)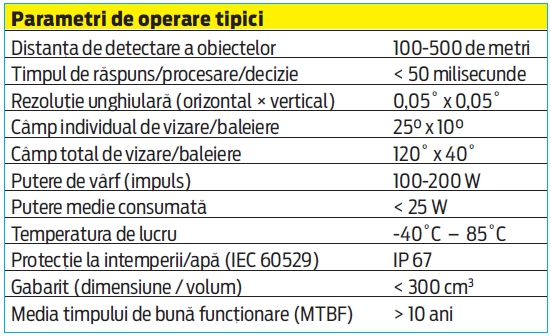
Așa cum subliniam și în articolele anterioare privind senzorii pentru automobile, astfel de specificații sunt destul de greu de atins simultan cucerința unui cost acceptabil. Desigur,specificațiile privind performanțadispozitivului LiDAR (distanța, rezoluția, viteza de răspuns) sunt primordiale, însă se fac eforturi mari și pentru miniaturizare și pentru fabricabilitate, și imediat vom discuta unpic despre aceste ultime două cerințe. (1) Reducerea gabaritului este importană mai ales pentru echipa care face design-ul caroseriei, pentru ca dispozitivul să poată fi integrat fără probleme în exteriorul automobilului (adică fără a întrerupe vizual liniile de stil/formă), însă problemanu este deloc simplă în cazul vehiculelor autonome, care necesită astfel de senzori de jur-împrejur (ci nu doar față-spate ca în cazul ADAS). (2) Manufacturarea în serie mare a dispozitivelor LiDAR depinde în mare măsură de principiul prin care se face baleierea orizontală/verticală a fascicolului laser, sens în care s-au reliefat câteva soluții, dar este posibil ca viitorul să mai aducă schimbări.
Dezvoltări diverse și concrete
Spuneam anterior că primele dispozitive LiDAR foloseau reorientarea mecanică (gen turelă) pentru baleirea orizontală a razei laser folosită la detectarea obiectelor, și că mai apoi s-au pus la punct metode mai miniaturale de reorientare a facicolului (precum MEMS). Mai mult, cerința de încapsulare a dispozitivelor electronice și opto-electronice – revelată de multicel ca dezirat normal în industria automobilelor – nu doar că filtrează drastic între arhitecturile principiale de baleiere incrementală, dar impune încorporarea lângă senzor a circuitelor de procesare a semnalelor. De exemplu, unitățile LiDAR moderne pot utiliza detectarea FMCW (frequency-modulated continuous wave), pot include circuitele opto-electronice și pot folosi baleierea razei laser prin abordarea solid-state OPA (optical phased array). Iar integrarea tuturor componentelor într-un singur dispozitiv, învelit într-o capsulă mică, este premisa pentru obținerea unui cost suficient de redus (în producția de serie).
Majoritatea sistemelor LiDAR pentru atomobile folosesc detecția ToF (time-of-flight), adică prin emiterea câte unui impuls de laser și recepționarea impulsului reflectat de obiect, respectiv prin măsurarea timpului pe care îl necesită lumina pentru a parcurge distanța pâna la acel obiect. Însă datorită frecvenței și puterii impulsurilor, această soluție nu se pretează la o integrare opto-electronică prea grozavă pentru industria auto, perspectivă din care arhitectura detecției coerente (FMCW) se arată mai potrivită. Dispozitivele LiDAR de tip FMCW utilizează laseri de putere mică lucrând în undă continuă, care pot colabora ușor cu dispozitivele de ghidare/baleiere optică și cu circuitele de procesare integrate în același suport semiconductor, rezultând deci într-un gabarit foarte mic. Arhitectura FMCW este și ceva mai potentă în a detecta viteza de deplasare a obiectelor vizate de dispozitivul LiDAR, ceea ce are efect inclusiv asupra algoritmilor de identificare a respectivelor obiecte și de predicție a comportamentelor (precum gesturile/mișcările pietonilor), cu impact asupra deciziilor/asistenței oferite pentru dirijarea autovehiculului în trafic. Un alt avataj de partea FMCW este faptul că performanța nu se degradează când lucrează în lumina directă a soarelui sau a farurilor din sens opus. Specialiștii au luat în calcul inclusiv imunitatea senzorului la fascicule laser provenind de la alte dispozitive LiDAR.
Din perspectiva principiului de acoperire unghiulară a câmpului vizat, avem deja o serie de soluții moderne pentru baleierea fascicolului (micro-oglindă reorientabilă prin MEMS, micro-oglinzi în matrice fixă, matrice de senzori cu fază controlabilă, etc), și tendința este de adoptare a celor care se pretează la încapsulare solid-state (fără componente în mișcare). Notăm și faptul că integrarea/încapsularea cuprinde și eventualele componente optice exterioare (filtre, lentile, ghidaje), precum și faptul că au apărut abordări în care nu mai este nevoie de optică exterioară.
În privința componentelor optice aflăm și despre o tendință cu potențial semnificativ: adoptarea așa-numitelor piese optice cu forme libere (piese optice fără simetrie rotațională și cu variații abrupte/neregulate în curbura suprafețelor de reflexie/refracție a luminii). Proiectanții de sisteme optice știu că uneori o piesă optică cu forme libere poate înlocui un mai voluminos grup de piese optice clasice (lentile, prisme, oglinzi), conferind astfel atuul dimensiunii reduse. După ce se va pune la punct producția de serie mare pentru piesele optice cu forme libere astfel încât să se satisfacă cerințele de precizie dimensională și de finețe a suprafețelor (precizie a formelor de sub 200 nanometri; rugozitate sub 3 nanometri; rezoluție unghiulară sub 2 nanoradiani), sisteme LiDAR vor putea acoperi un câmp vizual mai mare și vor avea pierderi optice mai mici, ceea ce se va reflecta în creșterea rezoluției pentru imaginile generate și în extinderea distanței de detecție.
În context mondial, putem concluziona că mai toate eforturile de concepere și proiectare a dispozitivelor LiDAR pentru automobile vizează în primul rând miniaturizarea. Dar notăm și faptul că dispozitivele destinate dotării autovehiculelor trebuie să respecte totodată câteva cerințe de protecție a mediului (laser nevătămător biologic; materiale reciclabile; etc).
În loc de încheiere
La final, vă semnalez două știri venite din cercetare, constituind posibile perspective și pentru dezvoltarea (sau chiar reformarea) tehnologiilor LiDAR.
(1) Printr-o colaborare între universitățile din Sydney și din Basel, s-a demonstrat posibilitatea concretă de controla, la nivel de foton, efectul de emisie stimulată (postulat de Einstein în 1916, și constituind esența funcționării laserului). Realizarea este importantă atât în direcția miniaturizării dispozitivelor laser (cu aplicării în condiții foarte discrete, precum biologie, fizică subatomică, calcul cuantic), cât și în direcția eficienței (cu potențial inclusiv în telecomunicații și microelectronică). (Vedeți www.nature.com/articles/s41567-023-01997-6)
(2) Cercetători de la Sandia National Laboratories au demonstrat posibilitatea de a controla dinamic direcționarea pulsurilor de lumină provenite de la surse de lumină convenționale, necoerente, ceea ce deschide perspective deosebite, întrucât direcționarea dinamică a fascicolului/pulsului de lumină era până acum apanajul exclusiv al laserului. (Vedeți www.nature.com/articles/s41566-023-01172-6).
Tags: tehnologie, automobil autonom, LIDAR, aplicatii LIDAR
Parerea ta conteaza: ![]()
![]()
![]()
![]()
![]()
Asemanator
 120 de ani de Siemens în România: parteneriat durabil cu mediul universitar tehnic
120 de ani de Siemens în România: parteneriat durabil cu mediul universitar tehnic- Alte iterații Quantum-Computing
- Europa încetinește. Factori externi influențează ritmul politicilor climatice
- Stocarea datelor digitale
- Francesco Giovane, Endava: România a devenit principalul centru tech din Europa pentru operațiunile Endava
- Mentenanța în informatică
